Hardware
Half-Life Gravity Gun
- Recreated a device from the video game "Half-Life" that has only ever been seen in science fiction.
- Used operational amplifiers, half h-bridge motor drivers, hall sensors, buck converters, a 6S LiPo battery, and a homemade electromagnet to design, build, and debug a circuit that levitates a magnetic object with only analog electronics.
- Created a 3D printed assembly in SOLIDWORKS with adjustable arms for levitation, an enclosure for the 6S LiPo battery, and awesome aesthetic LEDs.
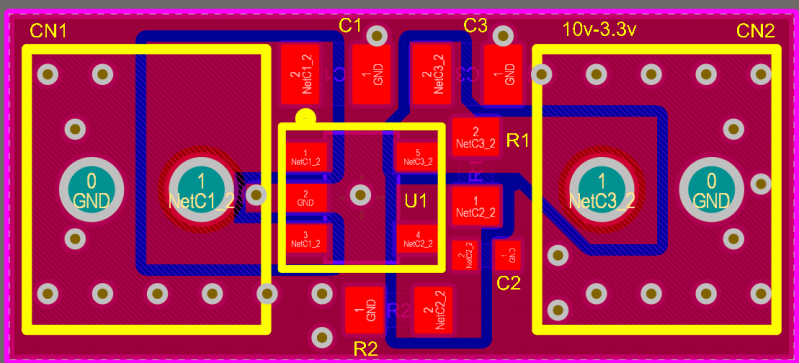
Tracking Antenna Controller PCBA
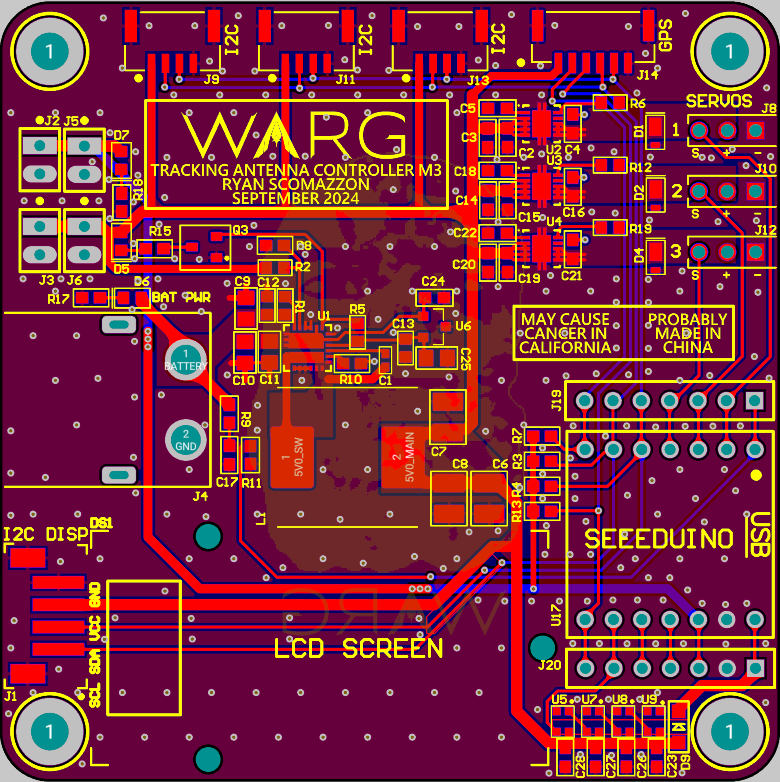
- Designed the schematic and PCB to control the tracking antenna that follows the drone for the Waterloo Aerial Robotics Group to maximize RF communication range.
- Based on a Seeduino MCU
- Has servo outputs with overcurrent protection
- Has I2C and UART GPS output connectors with the Pixhawk standard
- Has a LDO+buck regulator circuit to regulate the voltage of 3s,4s,5s or 6s LiPo batteries.
- Assembled with a reflow oven
- Debugged a QFN package IC with a heat gun and flux to reflow components.
- Used an oscilloscope and DMM to validate the operations of the board after performing continuity/short testing.
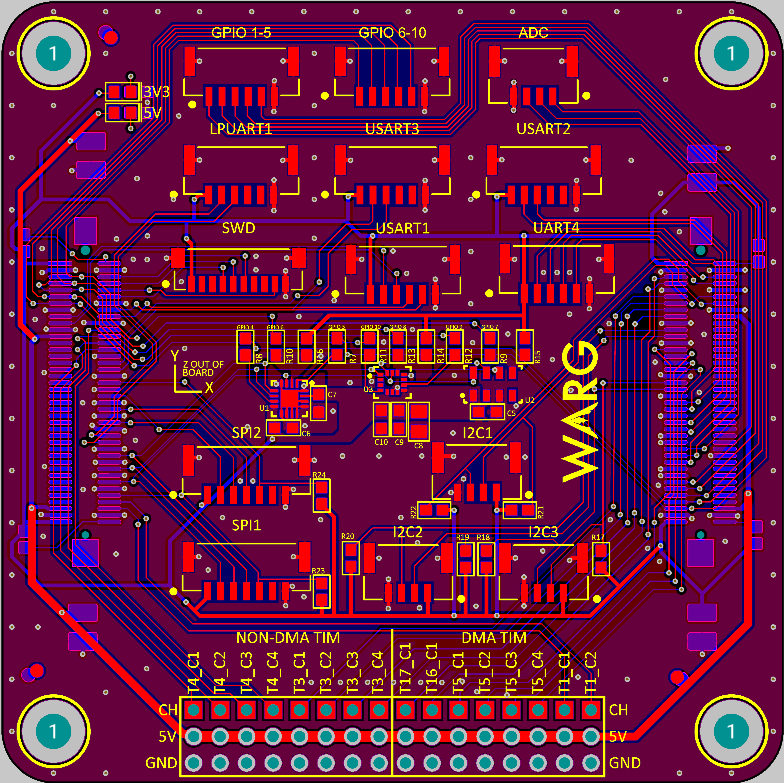
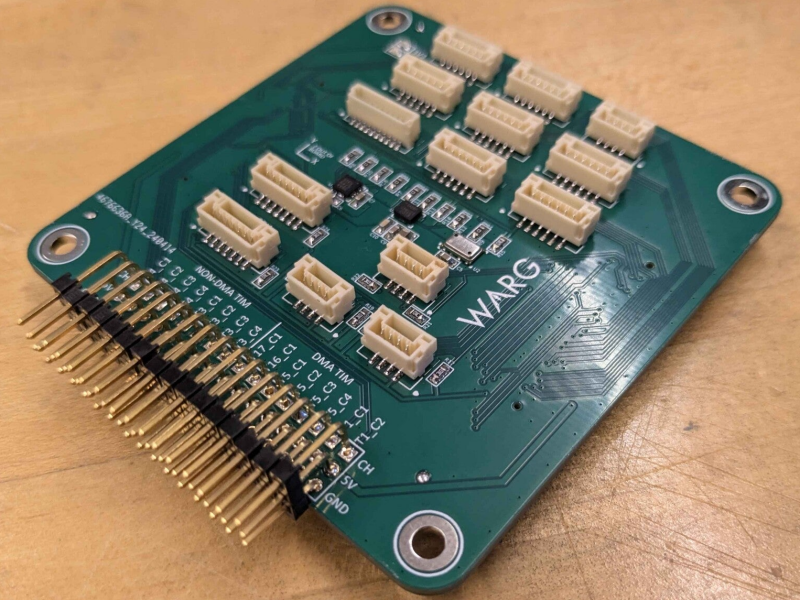
Zero Pilot Flight Interface Board
- Designed the schematic and PCB for an sensor interface board in Altium for the Waterloo Aerial Robotics Group.
- This board connects to a main STM32 board and provides standard connectors and sensors.
- Allows the firmware team to develop for flight sensors and equipment all on one board.
- Breaks out to provide standard SPI, UART, USART, I2C, and GPIO connectors.
- Includes an IMU, barometer, and magnetometer along with the supporting circuitry.
- Designed for optimal EMI, loop inductance, etc.
- Designed to be configurable using 0 ohm resistors.
Fallout Power Armor Helmet
- Created a real life working version of the power armor helmet from the video game Fallout for Hacksmith Industries (15M+ YouTube subscribers)
- Has an augmented reality heads up display that shows suit stats, overlays different vision modes, shows vitals, and has built in tool readings.
- Includes heat vision, vision, night vision, telescopic vision, a pneumatically opening mask, a voice changer, a respirator that can run on two different air supplies/filters and a flood light (custom PCB).
- Uses OpenCV, Python, Linux GStreamer, a custom PCB, RevPi PLC, Nvidia Jetson, and 3D printing.
LDO Voltage Regulator Board
- Designed an LDO voltage regulator PCB and schematic in Altium, minimizing size and maintaining design practices.
- Designed as part of the Waterloo Aerial Robotics Group
Professor Puddles

- Placed 1st overall at the Hack the 6ix hackathon.
- Won a prize valued $320
- 219 participants, over 50 teams.
- Uses OpenCV to detect and notify the user when they have bad posture.
- If you ignore the notifications, the duck starts yelling and quacking at you.
- He really does not like it if you ignore his warnings, and he will physically spit at you if you don't fix your posture.
- Communicates wirelessly with a Raspberry Pi via Python Sockets to control a servo motor.
DevPost: Professor Puddles | Devpost
GitHub Repository: lucasreljic/Professor-Puddles: Our project for hack the 6ix. (github.com)
PiCasso - Hack the North 2022.
- Physically draws where the user is looking on the paper (no physical human interaction).
- Uses the AdHawk MindLink glasses and their API for eye tracking.
- Created in only 36 hours during Hack the North 2022.
- Had our project featured on the Hack the North 2023 website.
- I developed a stronger knowledge for working with APIs.
- Required careful consideration to prevent unwanted eye movements from registering in the code.


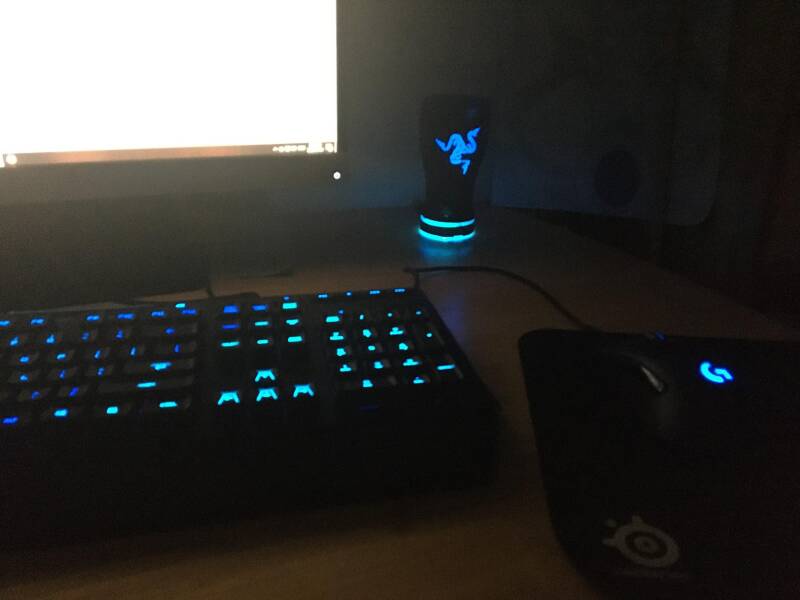
Razer Cup
- Iterated on from grades 10-11.
- Wirelessly connects to my computer via Raspberry Pi over the internet.
- LED colour is synced to my keyboard and mouse while reacting to events in video games.
- Iteration 1 used SSH for connection.
- Iteration 2 used sockets in python and had much less delay.
- Iteration 3 was a larger overhaul, described below.

Razer Cup V3
- Similar to previous versions but has 4, separately controlled LEDs rather than one.
- I designed a custom circuit to allow multiplexing for 12 led pins with only 4 GPIO pins that evades the shortfalls of traditional multiplexing when some channels use common ground.
- This wire limitation created many technical barriers for me to solve.
- I wrote a fully custom control system in python that has the benefits of both multiplexing and PWM (which could not operate correctly together).
P.A.B.L.O. (Pong Assistant Beats Losers Only) - MakeUofT 2023
- Placed 3rd overall at UofT's MakeUofT hackathon winning a prize valued at $350.
- Created in 24 hours.
- Throws you a ping pong ball when you need it.
- Uses OpenCV to track where your hand is and throws the ball directly at it.
- Hardware controlled via Arduino and C++.


Guitar Playing Robot
- This robot reads music from a colour strip and then plays the music on the guitar.
- I thought out of the box and came up with many major ideas such the camshaft fretting mechanism.
- The main control system is written in RobotC.
- There is an additional system that converts any digital song into coloured squares for the robot to read. More details on this are in the software section.

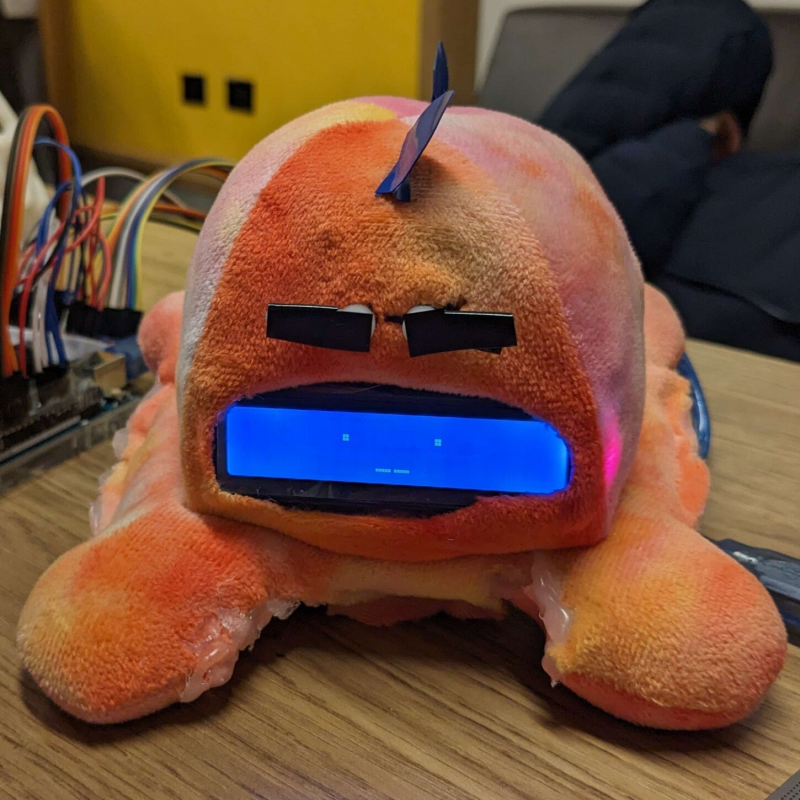
Mindosaur
- Created a robo-dinosaur that reacts to your emotions and listens to Spotify with you, giving custom song recommendations to fit your mood.
- Uses an OpenBCI ECG headpiece to detect your emotions.
- Uses an Arduino to manipulate a custom LCD/servo controlled face to emote with the same mood as you.
- Created for DeltaHacksX.
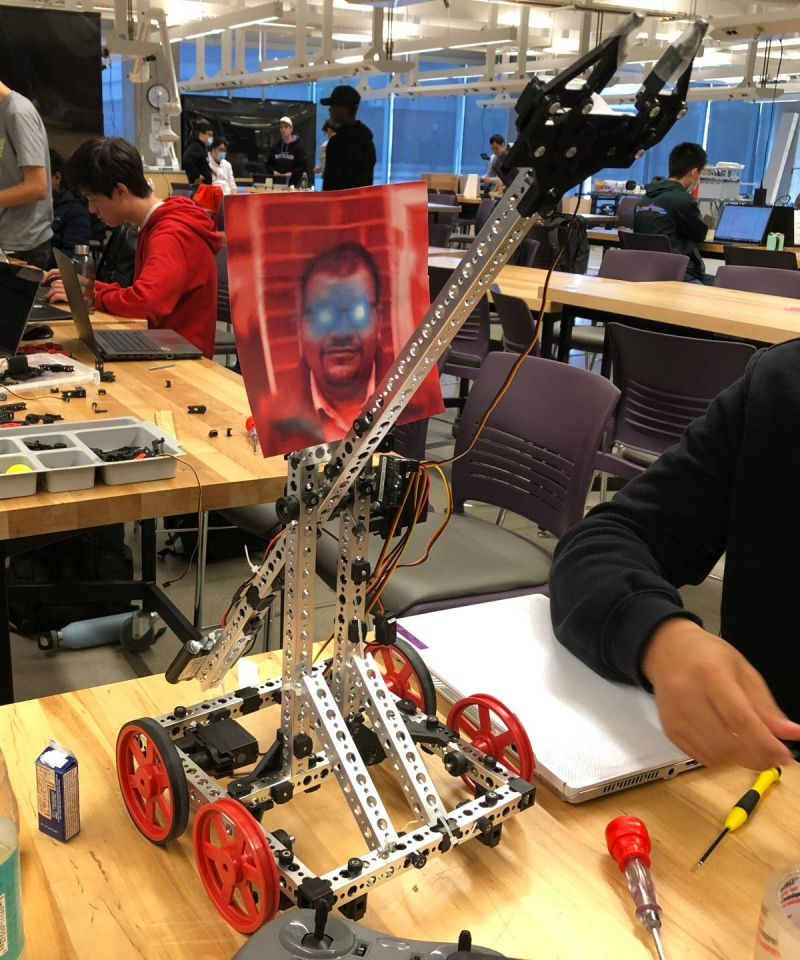
Haul-E - Hack the North 2023
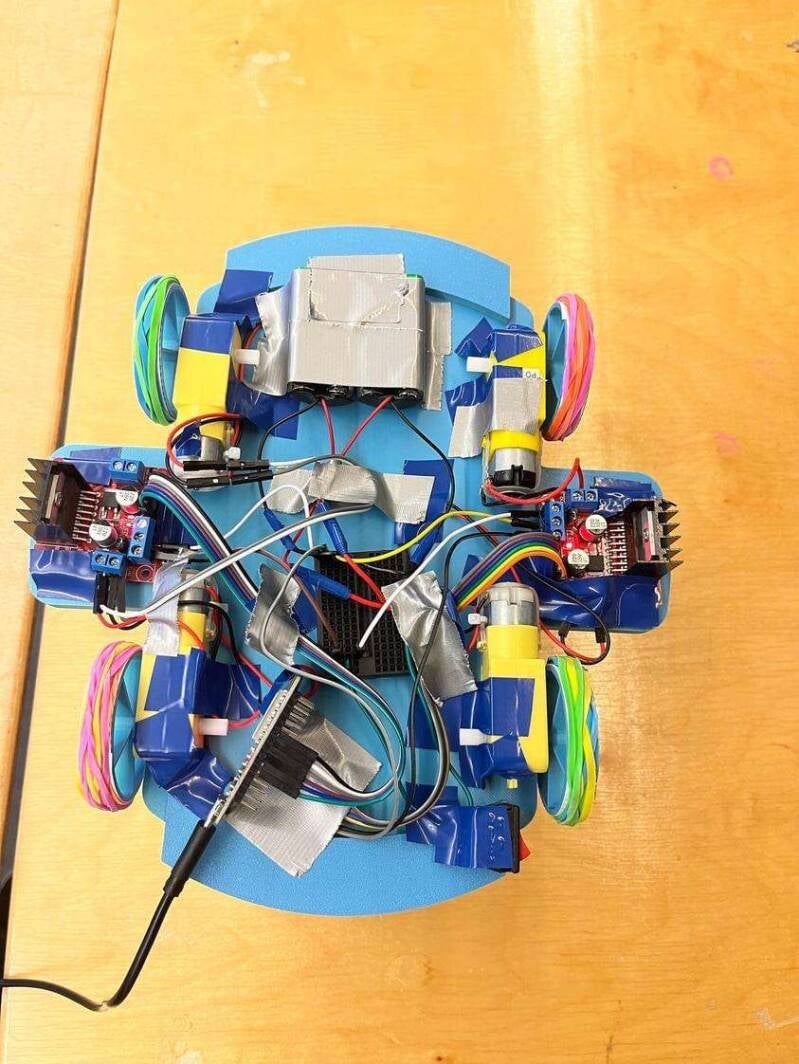

- Created in 36 hours during Hack the North 2023
- Uses eye tracking glasses to direct a path following robot to where you look so it can carry heavy items or just bring you a drink :)
- Uses sensor fusion from the eye tracking data and a gyroscope to generate absolute world space points from relative data, providing the glasses with spatial computing capability.
- Developed with Python, the AdHawk API, an ESP32, motor controllers, and C++.
NassarBot
- Designed in a team of four as part of my first "Tron Days" event at the University of Waterloo.
- Students were tasked to build a robot that can carefully place bones in various locations given limited parts and motors.
- Our robot got a near perfect score and quickly became a favorite of the profs, TAs, and other students.
- We received the Prof's Choice award for our robot.
Remote Fire Mechanism
- Fires the toy gun after a lever is hit
- Used as part of my physics project where I made a Rube Goldberg machine.
- LED indicates lever has been pulled and activates delay before firing.


My First Circuit - Bomb Defusal Training
- Disconnecting the right wire makes the yellow LED turn green and the wrong wires make it turn red (the LED has been taken off in the photo to be reused).
- I was about 11.
- Everything went quite well and it worked on the first try.
- This is what sparked my adventure into a world of electronics beyond just Lego robotics.
Hands-Free Eating Device
- While this project failed, I thought I would include it as I learned a lot.
- I made this shortly after the project above.
- Designed to put cereal into my mouth with the press of a homemade pedal.
- The motor didn’t end up turning correctly and I oversaw many design flaws.
- This was one of my first failed projects, likely due to my overconfidence of the previous success.
- This learning experience minimized future failures as I now have a more proven method of planning and testing.


Create Your Own Website With Webador